# /!\ REDACTION EN COURS /!\

Ciclope est un scanner open source et open hardware vendu par la société bq.
Il fonctionne avec le logiciel Horus.
La carte de pilotage est compatible Arduino.
Les fichiers STL permettant de construire le scanner, le logiciel Horus et le firmware sont disponibles sur github.
La documentation pour le montage, l'installation logiciel, la calibration est disponible et cerise sur le gâteau en grande partie en français.
- Article 3dnative
Documentation et liens
bq
• http://diwo.bq.com/en/presentacion-ciclop-horus/
• https://www.bq.com/en/support/ciclop/support-sheet
Github
• https://github.com/bqlabs/ciclop
• https://github.com/bqlabs/horus
• https://github.com/bq/zum
Reprap
• http://reprap.org/wiki/Ciclop
• http://reprap.org/wiki/Horus
Firmware
• http://diwo.bq.com/en/horus-fw-released/
Pièces imprimées
Les différentes parties ont été produites grâce a l'imprimante 660 pro de l'I-Lab de Toulon.
Electronique
Shield arduino
J'ai trouvé un kit chez banggood.com.
Il comprend:
- une carte Arduino Uno
- un shield Zum Scan
- un driver moteur avec son radiateur
- un câble USB
Webcam
Après avoir testé différente webcam je confirme qu'il faut une C270HD de chez logitech.
Acheté chez amazon.com.
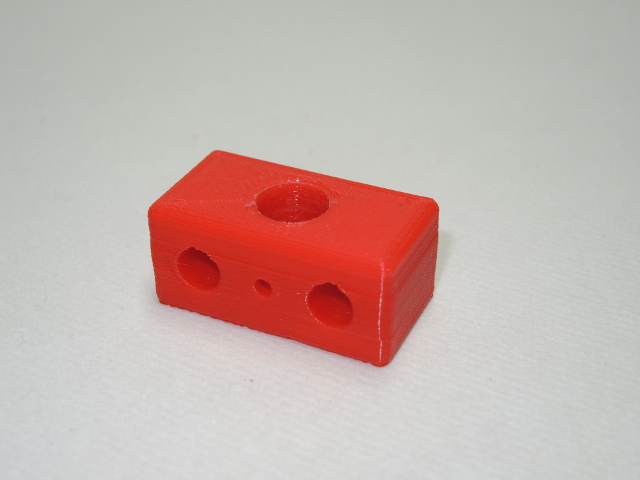
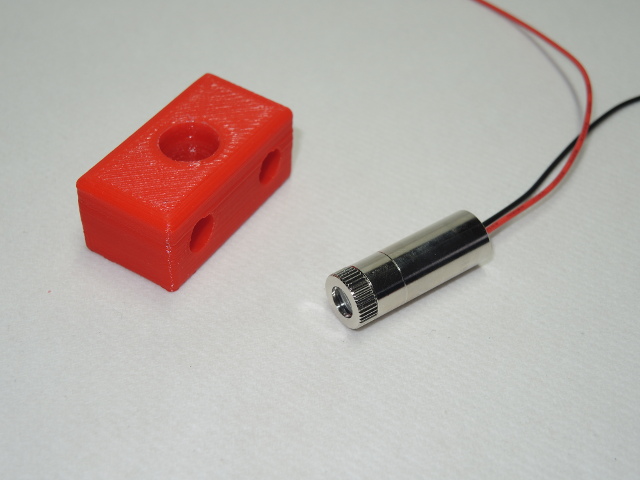
Laser
La bom list donne comme information "Red Line Laser, 5V, 60º, class 1, with connector".
J'ai donc acheté des lasers répondant aux informations données, mais le diamètre du corps des lasers achetés est supérieur au logement des pièces d'origine.
fichier laser-holder modifié avec freecad.
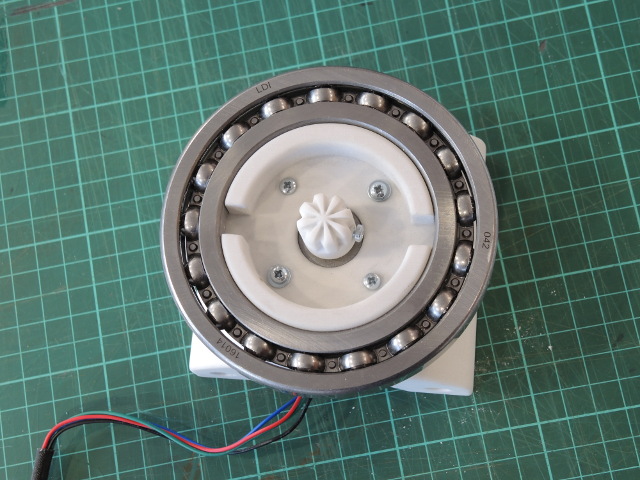
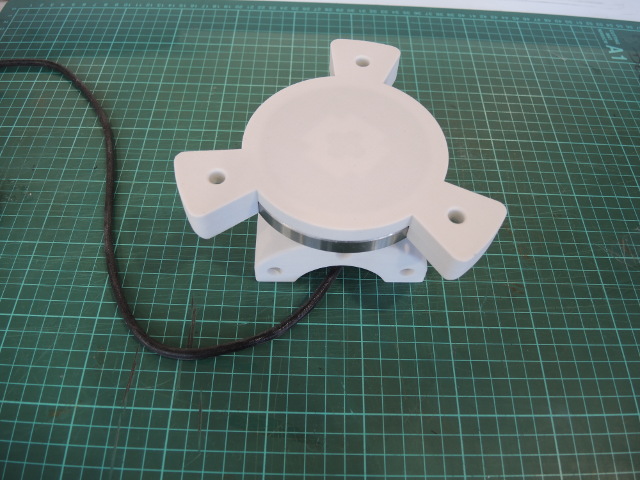
Mécanique
Le roulement a été acheté chez 123roulement.com.
Pour les tiges filetées, écrous et rondelle en PA6, je les ai trouvés chez visseriefixations.fr
Logiciel
Le firmware
pour compiler (sous Archlinux)
sudo pacman -S avr-gcc avr-libc
ensuite
make
pour installer le firmware avec l'interface de horus
sudo pacman -S avrdude
Horus
Dépendances
- OpenCV version bq
- Python 2
Construction
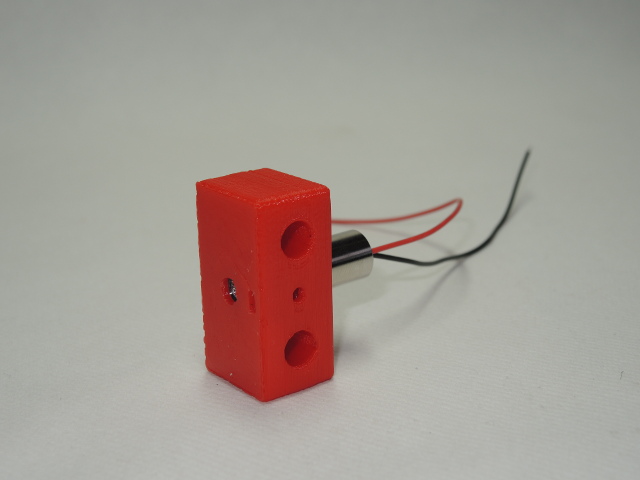
2017-01-07
Le diamètre du corps de laser est supérieur au diamètre des logements devant les recevoir.
Nous avons modifié le fichier des pièces laser-holder et produit sur une imprimante Anet A8.
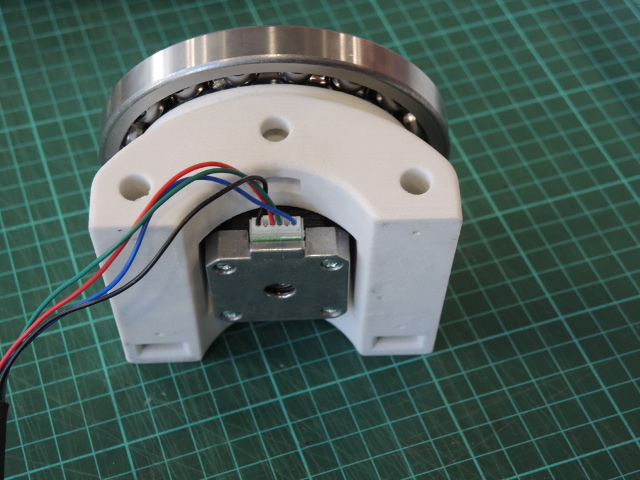
2017-01-14
Montage du moteur et du roulement sur l'embase.
2017-01-21
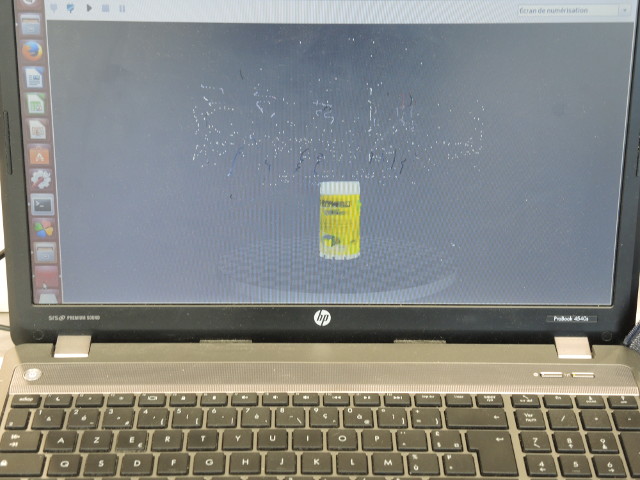
Installation sur un portable équipé d'une distribution Ubuntu du paquet openCV modifié.
Installation de Horus.
Test de reconnaissance de la webcam.
2017-02-04
Installation logiciel, et premier test pour s'assurer que les differents composants fonctionnent.

todo
- découpe du plateau sur la table laser trotec (pmma ep8mm).
- découpe des tiges filetées.
- Outil de calibration.
- Porter les modifications d'openCV sur une version plus récente et compilation (paquet pour Archlinux, debian ?).