Cela maintenant un moment que j'ai envie de m'amuser avec des cartes à base d'ESP8266.
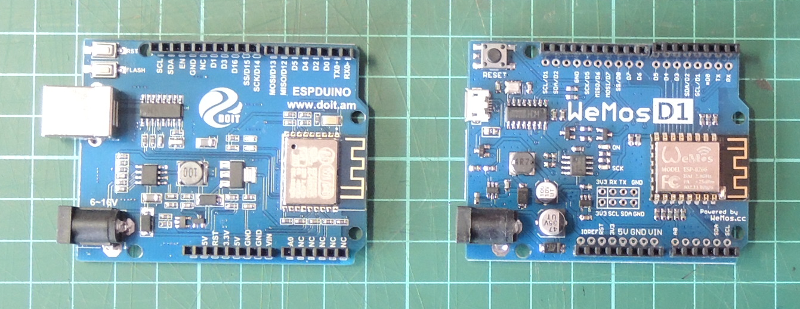
J'ai été chez mon vendeur favoris, et j'y ai trouvé ces deux cartes qui ont la particularités de ressembler à des cartes arduino.
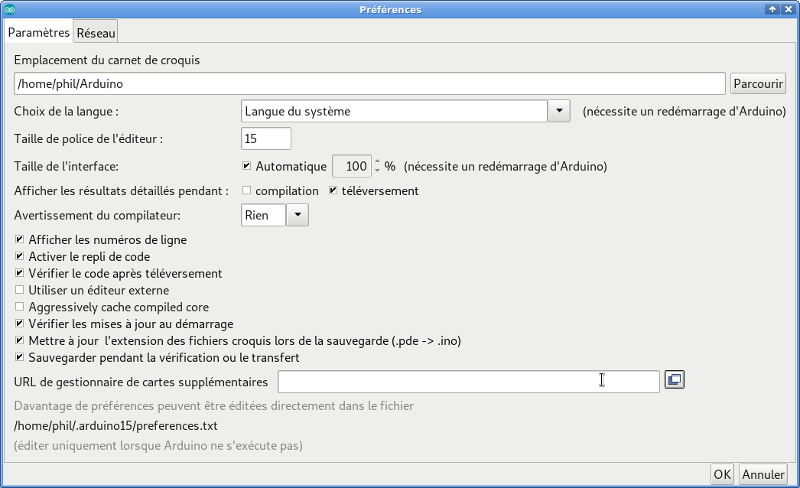
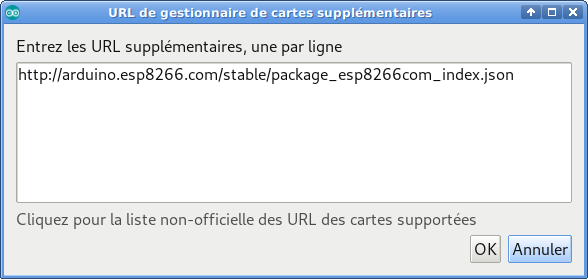
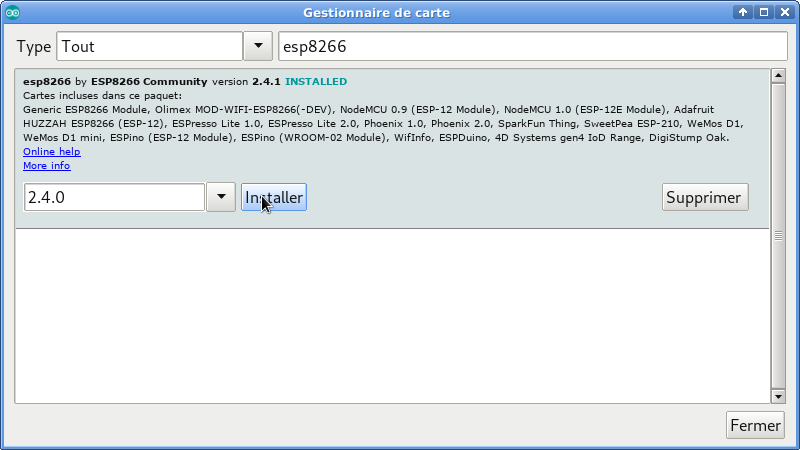
Ces deux cartes sont reconnues dans l'EDI Arduino après installation des bibliothèques nécessaires. Voir ici
Sur les cartes des ESP8266 différents à gauche ESP8266-13 et à droite ESP8266ex
Ce sont mes premières notes, on mettra cela en meilleur forme DQP.
Carte ESPDUINO - DOIT
EDI arduino
Bon allô docteur il y a un bug, je n'arrive pas a compiler blink !!!
alors voyons je fais un raz puis
j'utilise la version arduino-nightly
ensuite je récupère les sources sur https://github.com/esp8266/Arduino
j'installe (attention python 2 nécessaire).
Bon j'ai bien ESP8266-13 dans les cartes mais cela ne compile toujours pas je ne trouve pas un fichier....
la soluce... le fichier board.txt défini la variable espduino.build.variant=espduino
oui mais voila Linux est case sensitif et le répertoire est nommé ESPduino.... dommage Eliane.
Un rapide renommage du répertoire incriminé et hop cela fonctionne :-)
Autres tests rapides
j'ai testé les exemples fournis, la commande des GPIO à travers le réseau WiFi est d'une facilité déconcertante.
Carte WeMos D1R2
EDI arduino
Même configuration que précédemment, et là aucun problème de compilation pour BLINK ;-)















 .
.



