## /!\ REDACTION EN COURS /!\

Robot piloté via Wifi
Création d'un petit objet piloté par liaison Wifi grâce à un ESP8266.
Interface de commande :
- Android
- Application windows/Gnu Linux écrite avec Lazarus.
Les pièces 3D proviennent de Gabriele Ermacora
Construit au fablab I-Lab de Toulon.
-
2018-04-07 : 1er session de montage, 6 participants.


-
2018-05-19 : 2eme session de montage, 6 participants.
Documentation
Liste de pièces

Voici la liste de fournitures nécessaire pour la construction de ce petit suiveur de ligne.
Je ne mets pas de liens vers un fournisseur mais on trouve tout cela chez banggood.com ou sur Ebay.
| Désignation | Qté | |
|---|---|---|
. |
Moteur équipé avec roue. | 2 |
. |
ESP8266 D1 mini Wemos. | 1 |
. |
carte de pilotage des deux moteurs HG7881 (L9110). | 1 |
. |
powerbank 2600 mA/h | 1 |
 |
led | 2 |
 |
résistance de 330 ohms | 2 |
 |
Barrette sécable coudée male | 1 |
| Barrette sécable femelle | 1 |
Visserie
| Désignation | Dim | Qté | |
|---|---|---|---|
| Ecrou | M3 | 20 | |
| Vis | M3x40 | 8 | plateau, rotules |
| Vis | M3x25 | 4 | moteurs |
| Vis | M3x14 | 8 | batterie, carte |
Impression 3D
- Support batterie (2x) : support_batt_25v2.stl
- Support Moteur (4x) : db-supports.stl
- Rotule (2x) : db-ball_caster.stl
- Bras rotule (4x) : v04-db-dist-25-mm.stll
- Entretoise plateau (4x) : entretoise30.stl
- Entretoise carte (4x) :
Découpe laser
- Partie supérieur :
- Partie inférieur :
Circuit
Schéma de principe :

LEDs
- Port D4 GPIO2 -> LED Gauche
- Port D7 GPIO13 -> LED Droite
Moteurs
- Port D6 GPIO12 -> Port AIA Moteur Droit
- Port D5 GPIO14 -> Port AIB Moteur Droit
- Port D3 GPIO0 -> Port BIA Moteur Gauche
- Port D2 GPIO4 -> Port BIB Moteur Gauche
Table de vérité moteur
| IA | IB | Motor State |
|---|---|---|
| L | L | OFF |
| H | L | Forward |
| L | H | Reverse |
| H | H | OFF |
Programme et sketch
Programmes à installer
IDE Arduino
- L'IDE Arduino : Lien
- Le pilote (pour windows) USB / Série pour la connexion de la carte wemos : Lien
Une fois cela fait, il faut ajouter aux préférences de l'IDE Arduino.
-
Exécuter l'application puis aller dans le menu : ** Fichier -> Préférences **
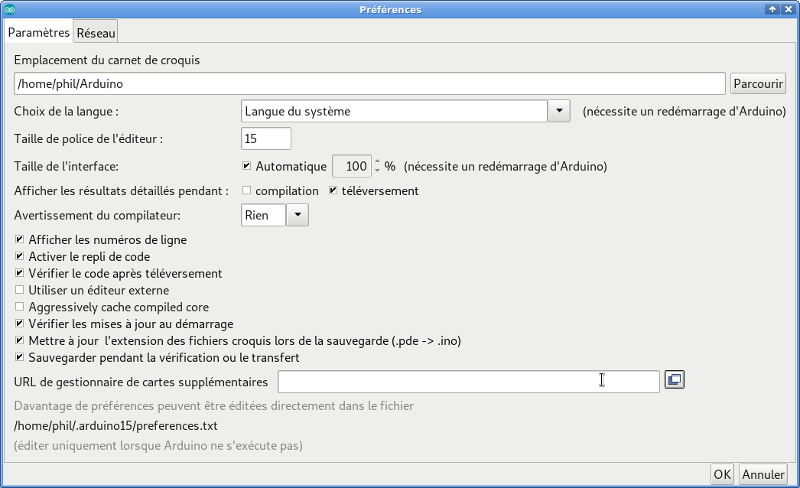
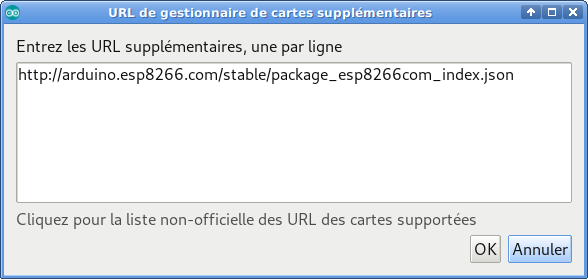
-
Dans la case URL de gestionnaire de cartes supplémentaires ajouter le lien suivant : "http://arduino.esp8266.com/stable/package_esp8266com_index.json"
-
Ensuite aller dans le menu : ** Outils -> Type de carte -> Gestionnaire de carte
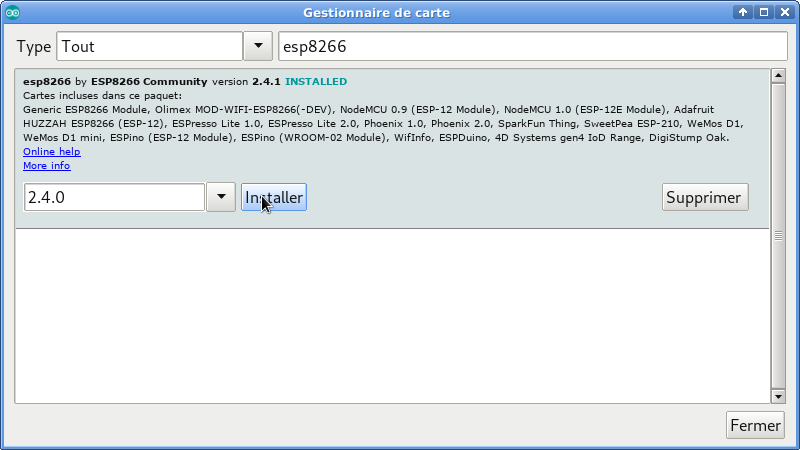
Rechercher ESP8266** et sélectionner et installer la version la plus récente.
Voila maintenant vous avez accès aux cartes à base de ESP8266.
- Pour compiler et téléverser votre sketch il vous faudra choisir la carte WEMOS MINI D1 R2 & mini
Pour ESP8266
Lien pour le téléchargement du sketch : Lien
APK pour android
Lien pour le téléchargement du fichier apk : Lien
installation
-
Copier l'apk sur votre téléphone.
-
Exécuter l'installation de l'apk, attention à bien autoriser l'installation d'application local ou non signée.

Configuration Wifi
Votre minirobo est alimenté.
- Dans les paramètres de votre téléphone activez le Wifi
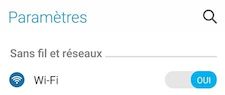
- on sélectionne le réseau Wifi (dans mon cas minirobo04)

- entrez le mot de passe
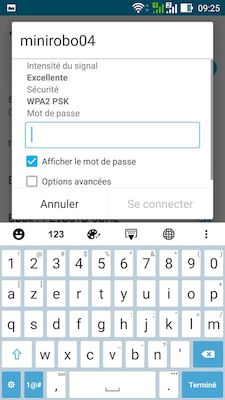
la connexion est active

une LED devrait être allumée sur le dessus du minirobo.
Utilisation
Dans votre menu application exécuter l'application voiture  .
.
| Etape 1 | Etape 2 | Etape 3 | Fin |
|---|---|---|---|
 |
 |
 |
 |
- Etape 1 : sélectionnez le champ Adresse IP
- Etape 2 : Entrez l'ip suivante 192.168.4.1 et appuyez sur terminé,
- Etape 3 : appuyez sur le bouton valider
- Fin : affichage de la réponse reçue du minirobo.
Appuyez sur l'une des quatre flèches et votre minirobo devrait se mouvoir.
IHM de commande
Application de pilotage écrite en Pascal avec Lazarus (OS Gnu/Linux)

** Version en cours de développement **